RoboCup比赛系列(0x06):RoboCup合肥国际赛第四天
本篇文章介绍《RoboCup合肥国际赛第四天》的相关内容。
前言
RoboCup即机器人世界杯,是目前世界上级别规格最高、影响力最广的机器人赛事(当然,DARPA机器人挑战赛除外)。中国曾经在2008年的时候举办过一次RoboCup国际赛,地点是在苏州,而七年之后,RoboCup国际赛又一次降临中国,这次则是在拥有多年举办机器人赛事经验的合肥。非常幸运的是我们晓萌机器人团队能够被邀请参与本次比赛新增的BSR项目,并获得免费近距离观摩比赛的机会。
这篇文章主要讲述我们在RoboCup合肥国际赛第四天所发生的一些事情,内容主要以亲身经历为主,其中也会涉及技术方面,但不是重点。
经历
Workshop
作为BSR项目的参赛队伍,我们有幸参加了在会议室举办的专题研讨会。从下面的会议日程上可以看到很多在国内外从事机器人研究的专家、学者会来到研讨会现场,与大家一起分享他们的最新成果,当然,我们在Team Spotlight环节也会登上演讲台去介绍我们自己现有所使用的一些成熟技术(演讲内容要全英文)。总之,我们在研讨会中收获很多。

Team Xmbot
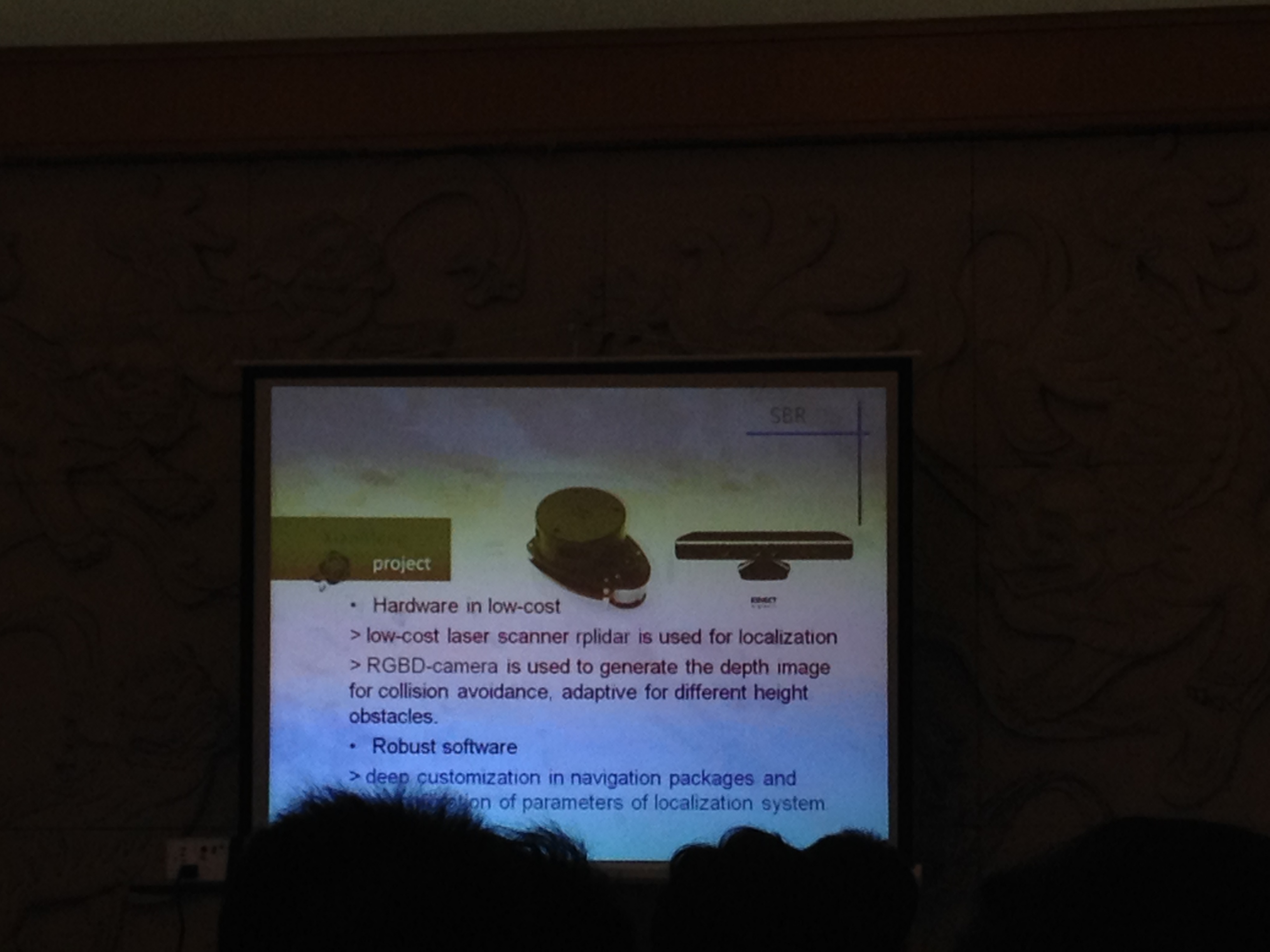
以下是我们晓萌队的技术展示部分,演讲者是我们的前任队长狗哥,即西工大一小学生(佩服狗哥登台演讲的勇气和英语口语能力!)。PPT中首先介绍了项目发展情况和团队人员组成,接着按照从底到高的架构顺序,依次介绍了晓萌机器人的硬件和所使用的传感器、嵌入式控制系统以及基于ROS的导航软件框架等。

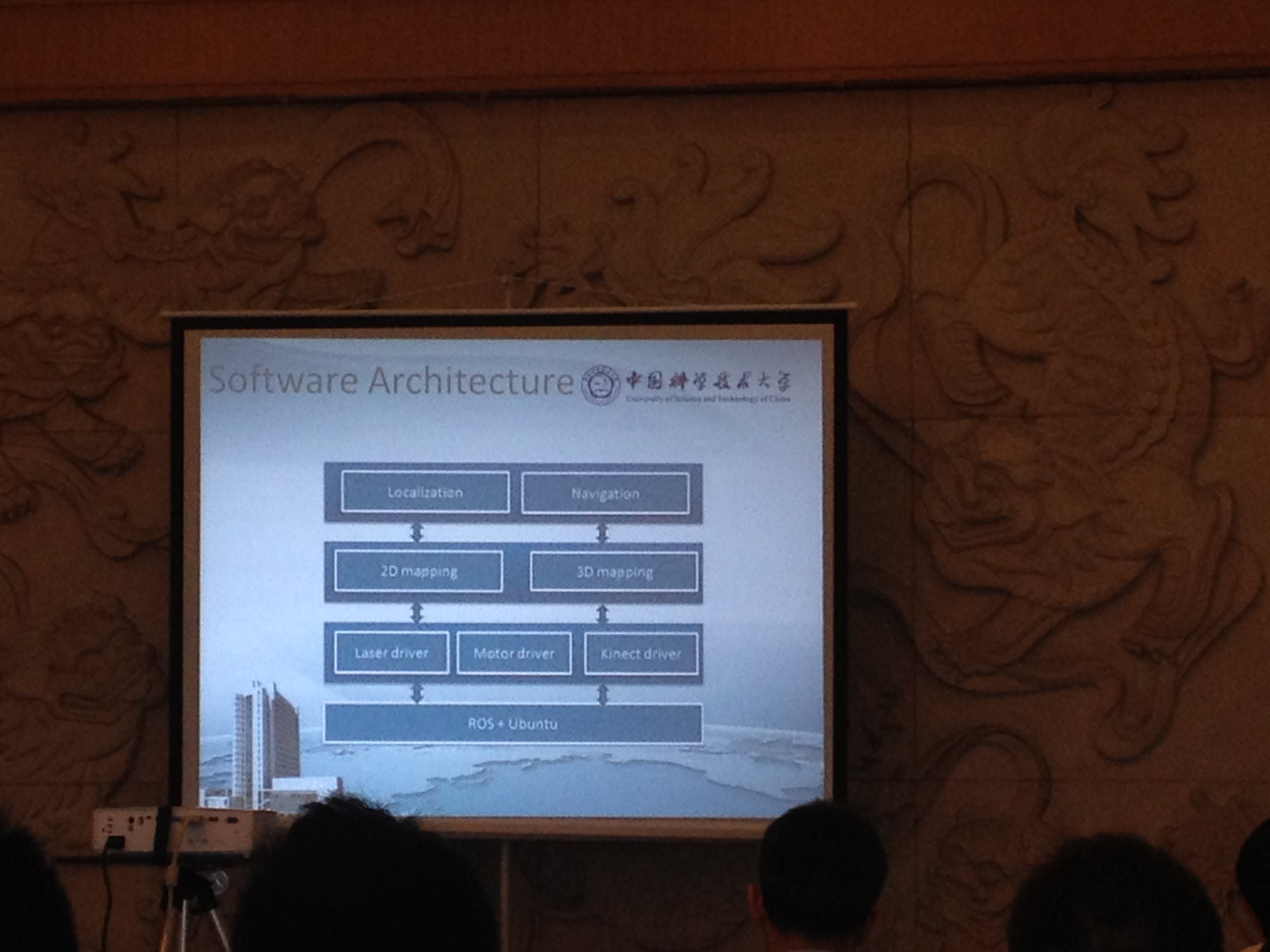
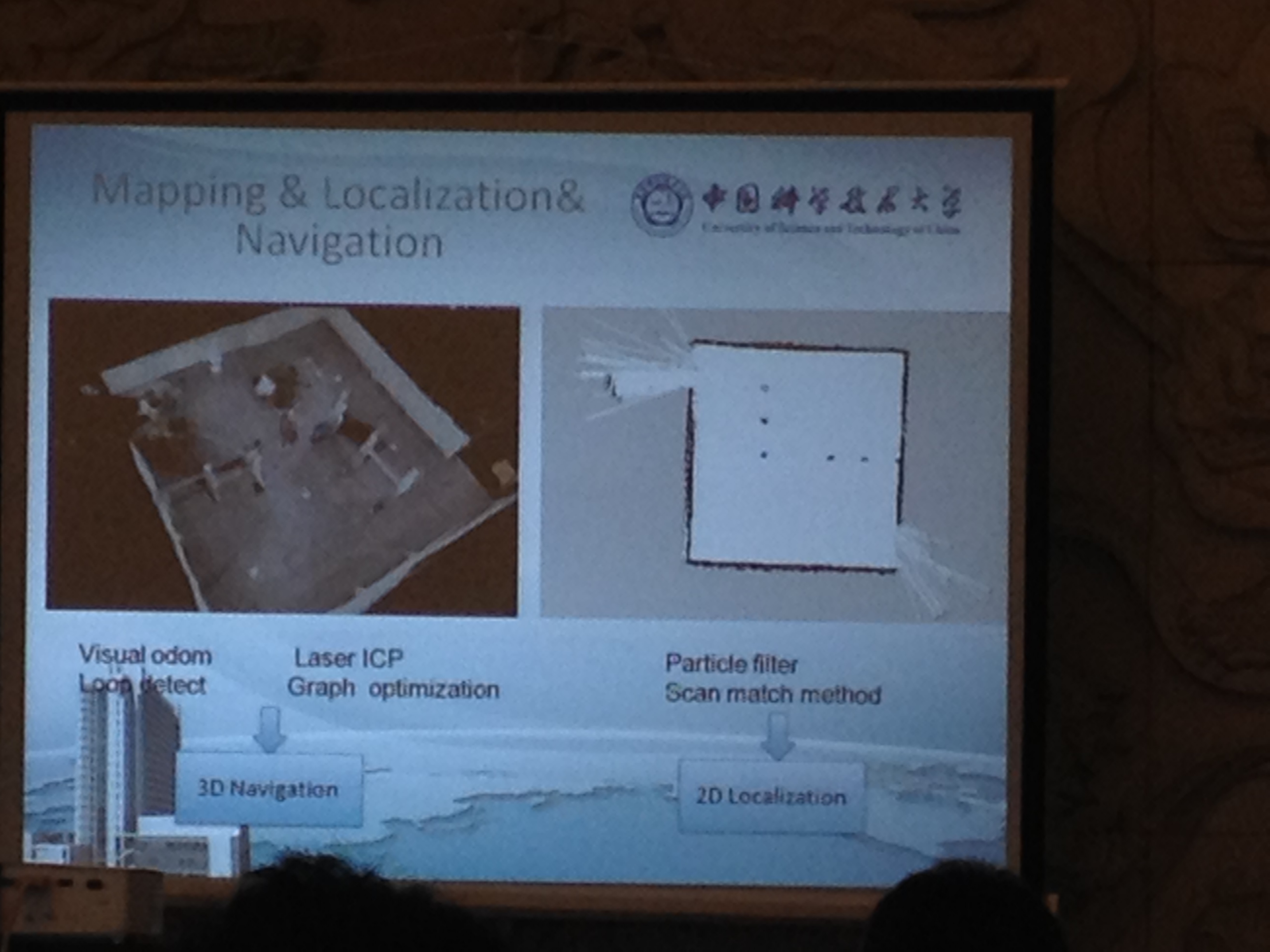
Team Kejia
以下是可佳低成本移动平台团队的演讲内容,其中主要涉及了硬件设计、软件架构以及建图、定位和导航所使用的算法介绍。



RoboCup@Home
RoboCup@Home项目组进行到第二天的争夺,尽管赛事紧凑、挑战性高、各支参赛队伍的水平有高有低,但就像下图所展示的那样,这些因素都妨碍不了RoboCup@Home这个大家庭各成员之间建立起牢固的友谊。在赛场上我们要为捍卫自己队伍的荣誉而战,而在场下我们则是愿意互相分享开发经验、共同为梦想而努力的好朋友,我想这就是RoboCup@Home以及RoboCup本身在赛事之外所教会给我的东西。

BSR
BSR项目预赛的第一阶段(测试机器人移动的精准程度)已经比完,接下的第二阶段比赛也会在明天拉开战幕。明天的比赛主要考查机器人的自主导航能力,即让机器人自主地从比赛场地的起始位置移动到目标位置,而且在移动的途中机器人不能碰到围墙和障碍物。为了完成比赛任务,如下图所示,我们使用了Robopeak RPLIDAR激光传感器和Kinect深度摄像机,并基于ROS平台进行二次开发。最后总体测试效果还不错,只是需要对算法中的某些参数进行进一步的调整。







总结
RoboCup第二个正式比赛日结束。在一天的时间中,我们既听了来自卡内基梅隆大学、东京大学、上海交通大学、中国科学技术大学等国内外顶尖研究机构专家学者的报告会,也观看了几场精彩机器人比赛。总之,这一天过得很充实,收获也很多,希望接下来我们团队可以在最后的比赛中取得好成绩!
文章作者: myyerrol
最后更新:
原始链接: https://myyerrol.xyz/zh-cn/2017/08/31/robocup_competitions_6_hefei/
版权说明: 本博客所有文章除特别声明外,均采用 BY-NC-SA 4.0许可协议 。获得许可后,要求转载时注明文章出处和网站链接,谢谢!